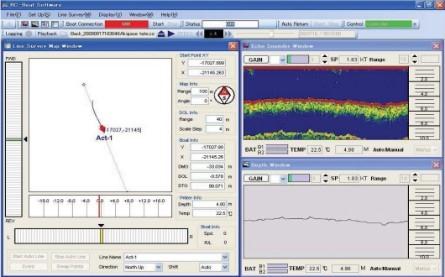
| 自动航行:航线测量 |
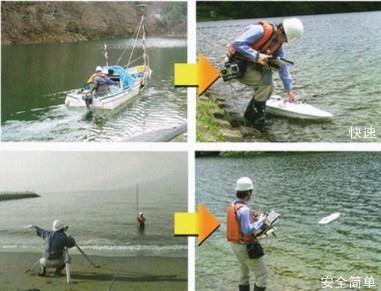
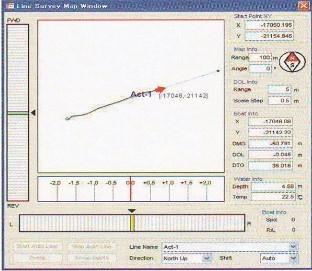
| ● 它可以1m/s的速度自动沿着设定的航线由起点至终点进行测量而无需人员操作。 |
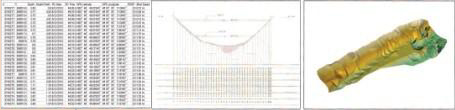
| 自动引航:目标测量 |
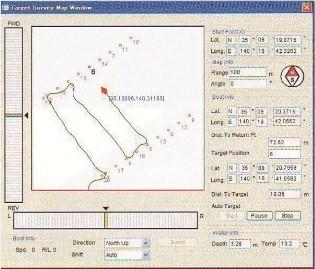
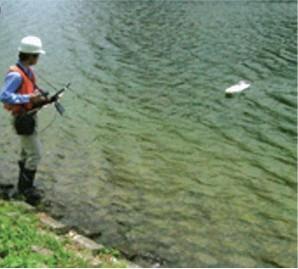
| ● 它可以自动沿着布设好的路径点按路径点顺序巡航测量而无需人员操作。 |
| 自动返航: |
| 遇到以下两种情况时该船可以自动返航至起始测点: |
| 1. 与无线LAN失去联系。 |
| 2. 电池电量不足20%。 |

| 双体船 |
| 双体船可以加载如流速仪、水质仪、ADCP(声学多普勒海流剖面仪)等传感器。此外,与单体船相比,双体船可有效减少倾覆。 |
| ● 双体船系。 |
| ● 专用水下摄像系统 |
| ● RTK-VRS辅助系统 SD卡扩展 |
| ● 纵向位移传感器系统(或测船姿态校正仪 |
| ● WQC-24等水质仪 |
| ● 高性能的自动航线测量系统 |


 标准配置:
标准配置:
遥控船
船的天线
船控制软件
无线局域网调制解调器
带控制板的天线 电源箱
船控制器
船用电池 2个
用于远程控制单元的电池1个
电池充电器 1个
| 船的尺寸 | |
| 长度 | 1,060mm |
| 高度 | 270mm |
| 宽度 | 250mm(不含天线) |
| 重量 | 9.3kg(加电池共13kg) |
| 电源参数 | |
| 发动机 | 有刷直流电机 2个 |
| 牵引力 | 2.2kg F |
| 船速 | 2.8kt(最大值) |
| 电源 | 可充电镍氢电池 10A 2个 |
| 电池工作时间 | 120分钟(船自动航行时) |
| 投影系统 |
横轴墨卡托 用户根据纬度设置参数(UTM-N,UTM-S) |
| 声纳测深(单束) | |
| 频率 | 200KHz |
| 测深范围 | 0.5-80M |
| 分辨率 | 0.01M |
| 增益 | 自动或手动(H/L 20级每次) |
| 采样间隔间 | 500ms |
| 波速角度 | 6度或24度 |
| GPS(SBAS) | |
| 分频率 | 1/10000s |
| 通讯装置 | 2.4GHZ 无线局域网 |
| 信号范围 | 500m |
| 计算机操作系统 | Windows XP 专业版、Windows 7(32位) |


